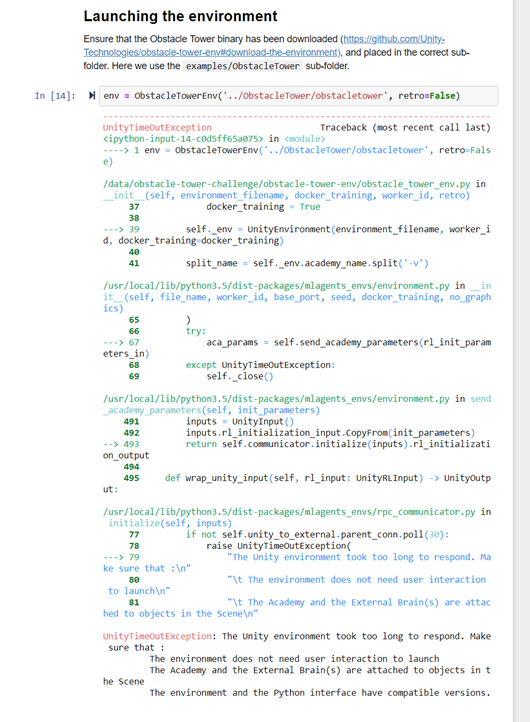
Traceback (most recent call last):
File “run.py”, line 26, in
env = ObstacleTowerEnv(args.environment_filename, docker_training=args.docker_training)
File “c:\unityproj\rl\obstacle-tower-env\obstacle_tower_env.py”, line 39, in init
self._env = UnityEnvironment(environment_filename, worker_id, docker_training=docker_training)
File “C:\ProgramData\Anaconda3\lib\site-packages\mlagents_envs\environment.py”, line 67, in init
aca_params = self.send_academy_parameters(rl_init_parameters_in)
File “C:\ProgramData\Anaconda3\lib\site-packages\mlagents_envs\environment.py”, line 493, in send_academy_parameters
return self.communicator.initialize(inputs).rl_initialization_output
File “C:\ProgramData\Anaconda3\lib\site-packages\mlagents_envs\rpc_communicator.py”, line 79, in initialize
“The Unity environment took too long to respond. Make sure that :\n”
mlagents_envs.exception.UnityTimeOutException: The Unity environment took too long to respond. Make sure that :
The environment does not need user interaction to launch
The Academy and the External Brain(s) are attached to objects in the Scene
The environment and the Python interface have compatible versions.
I’ve got some error and strange image with v1.1_windows.
But, It seems to work with v1.0 that I’ve got earlier.
INFO:mlagents_envs:
‘ObstacleTower-v1’ started successfully!
Unity Academy name: ObstacleTower-v1
Number of Brains: 1
Number of Training Brains : 1
Reset Parameters :
dense-reward -> 1.0
floor-number -> 0.0
tower-seed -> -1.0
Unity brain name: LearningBrain
Number of Visual Observations (per agent): 1
Vector Observation space size (per agent): 7
Number of stacked Vector Observation: 1
Vector Action space type: discrete
Vector Action space size (per agent): [3, 3, 2, 3]
Vector Action descriptions: Movement Forward/Back, Camera, Jump, Movement Left/Right
INFO:gym_unity:1 agents within environment.
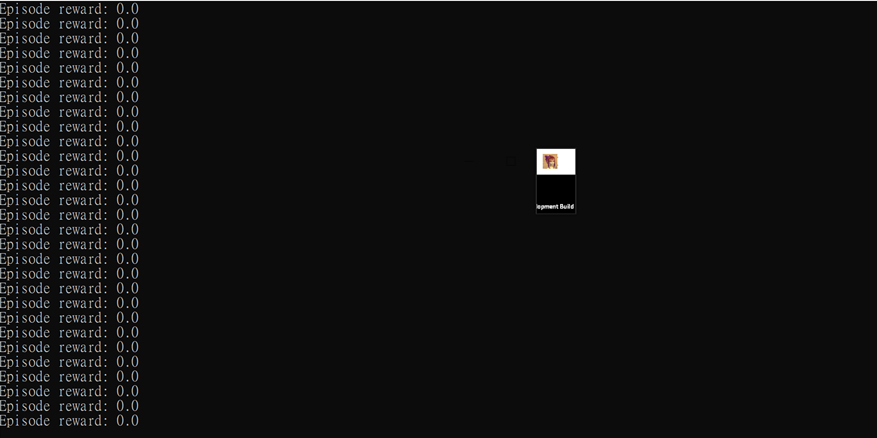
Episode reward: 0.0
Episode reward: 0.0
Can you give more details about how you’re running the binary? Is it on your host, or are you running inside docker containers? Are you setting any ENV variables specifically?
Thanks for pointing this out. I have been able to reproduce myself, and will be working to fix this today. There weren’t many changes made to the binary between v1 and v1.1 so we should be able to isolate the change.
Glad to hear it works for people. The black screen is intentional. By default we turn off the window rendering on order to not render extra frames when not necessary. We will be adding the ability to visualize during training though for those interested.